

La fijación con tornillos transpediculares en la columna lumbar es una técnica ampliamente aceptada para el tratamiento de patología traumática y degenerativa. Las complicaciones de la instrumentación espinal pueden ser graves. Sobrepasar caudal o medialmente la cortical del pedículo puede provocar lesiones nerviosas o durotomías incidentales.
La cirugía guiada por imagen computarizada ha demostrado tasas más altas de precisión en la colocación de tornillos transpediculares comparada con la fluoroscopia convencional.
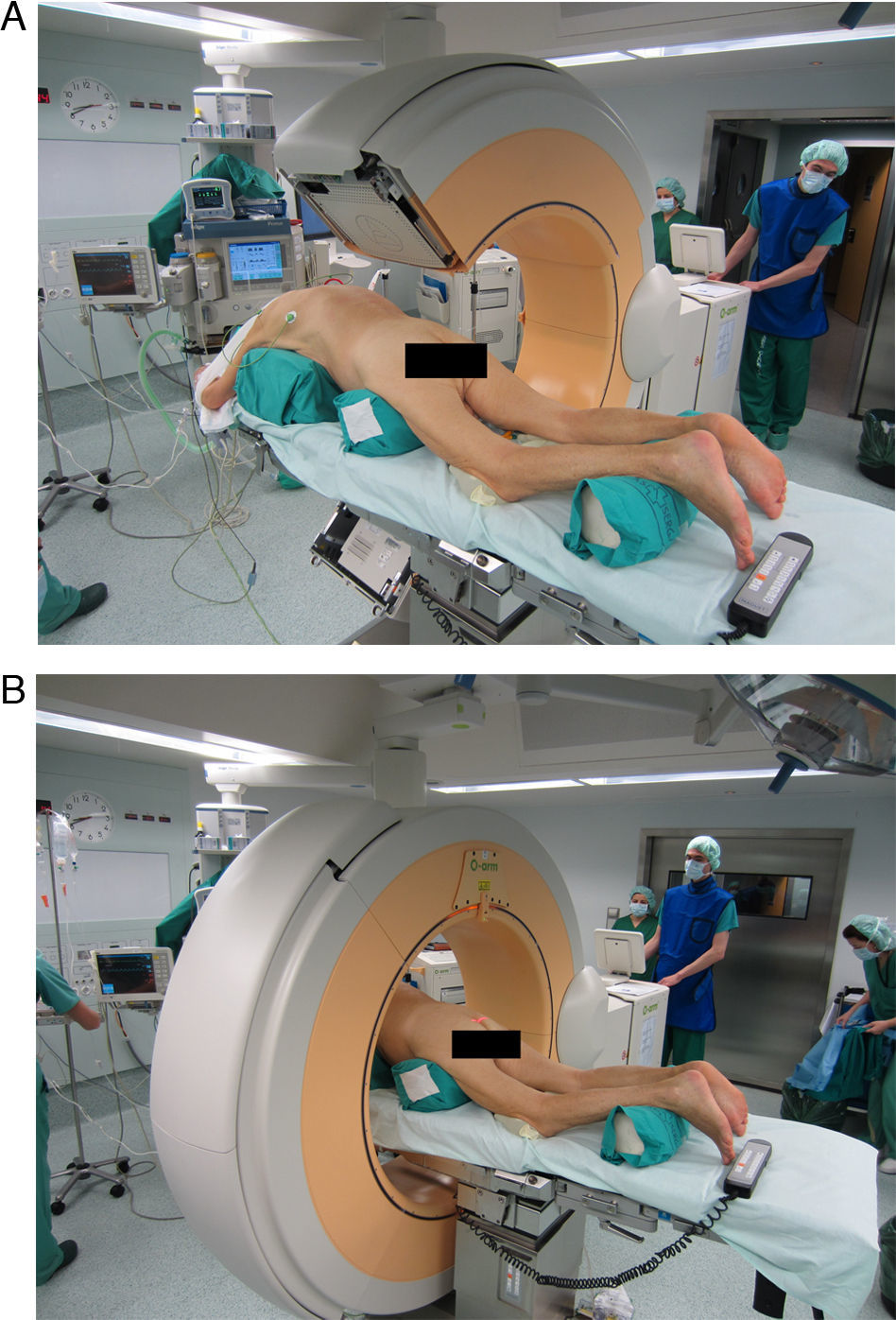
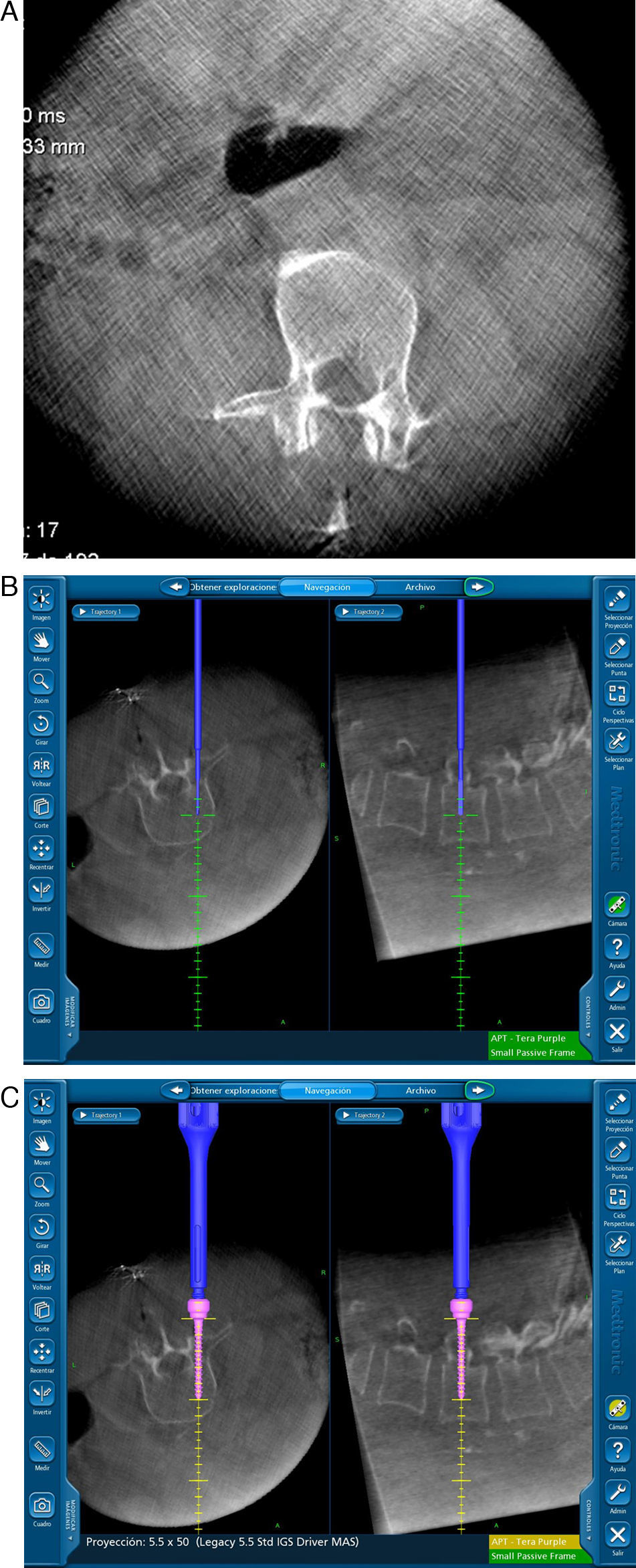
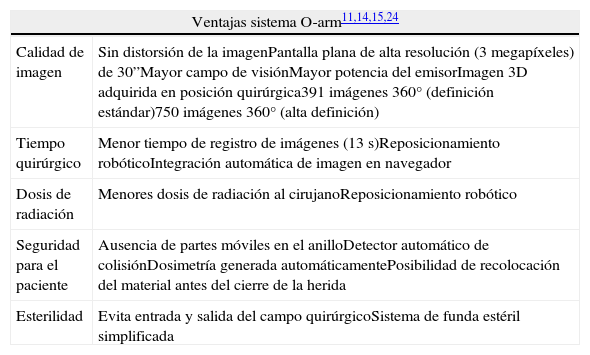
El O-arm tiene la capacidad de obtener imágenes similares a la tomografía computarizada (TC) y realizar reconstrucciones multiplanares.
En este estudio evaluamos una cohorte de pacientes en los que se realizó fijación lumbar posterior con tornillos transpediculares empleando el sistema de imagen quirúrgica O-arm.
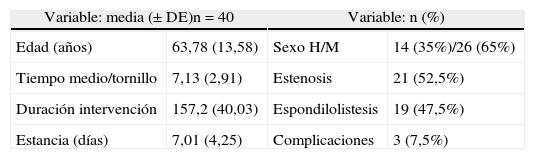
MétodosSe realizó un estudio retrospectivo de 40 casos consecutivos de fijación lumbar posterior empleando el O-arm. La población a estudio incluía 14 hombres y 26 mujeres. El rango de edad iba de 39 a 85 años, con una media de edad de 63,78 años.
Veintiún pacientes presentaban estenosis del canal degenerativa (52,5%) y 19 espondilolistesis (47,5%). Se obtuvieron imágenes con TC intraoperatoria. Se recoge el tiempo medio de intervención y la media de tiempo por tornillo.
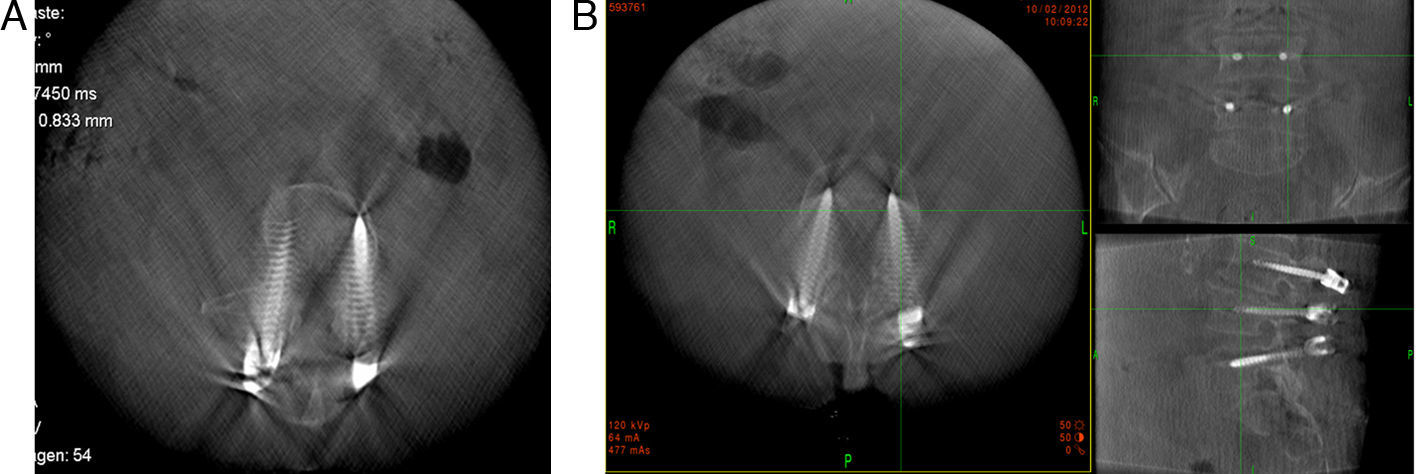
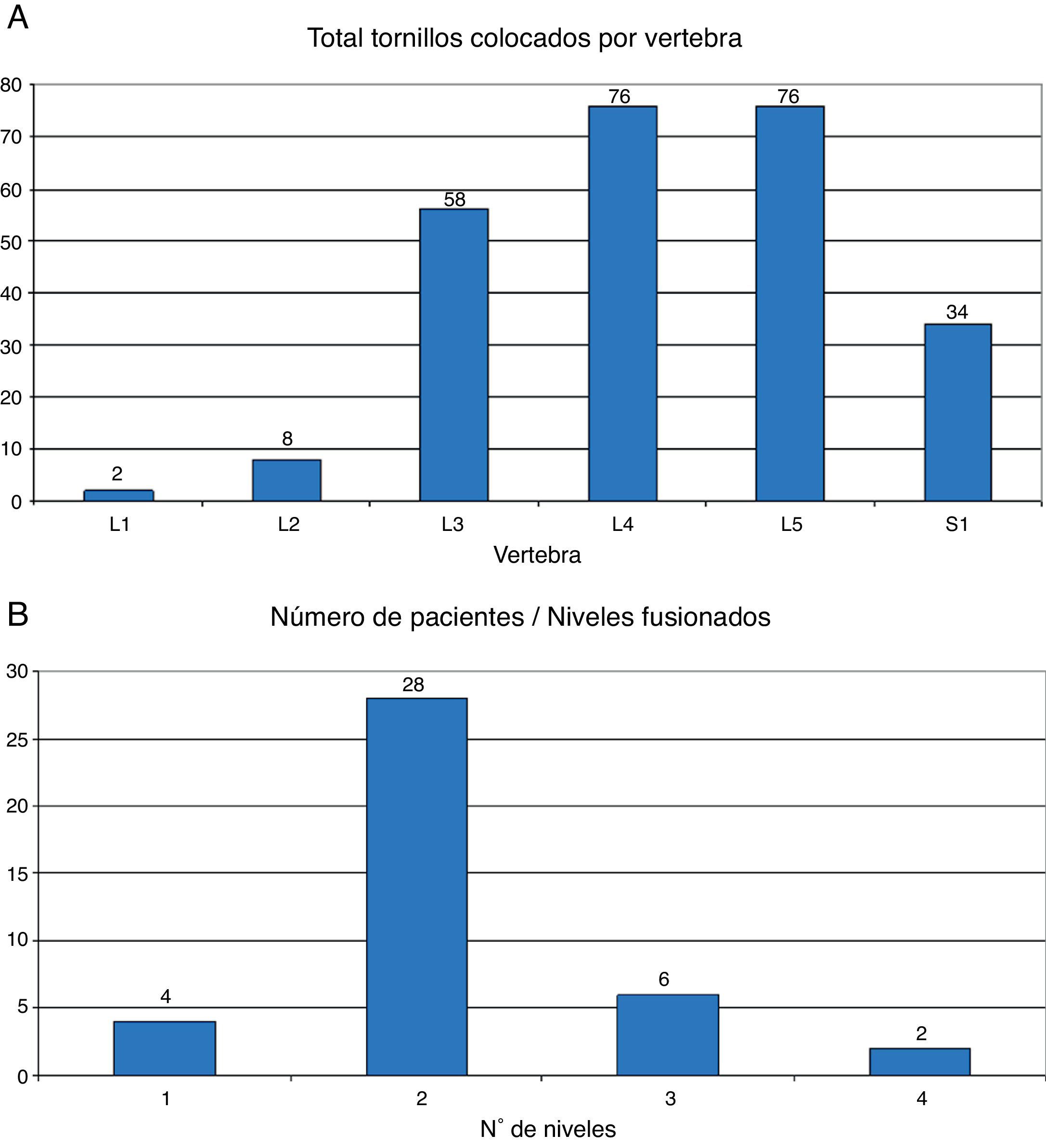
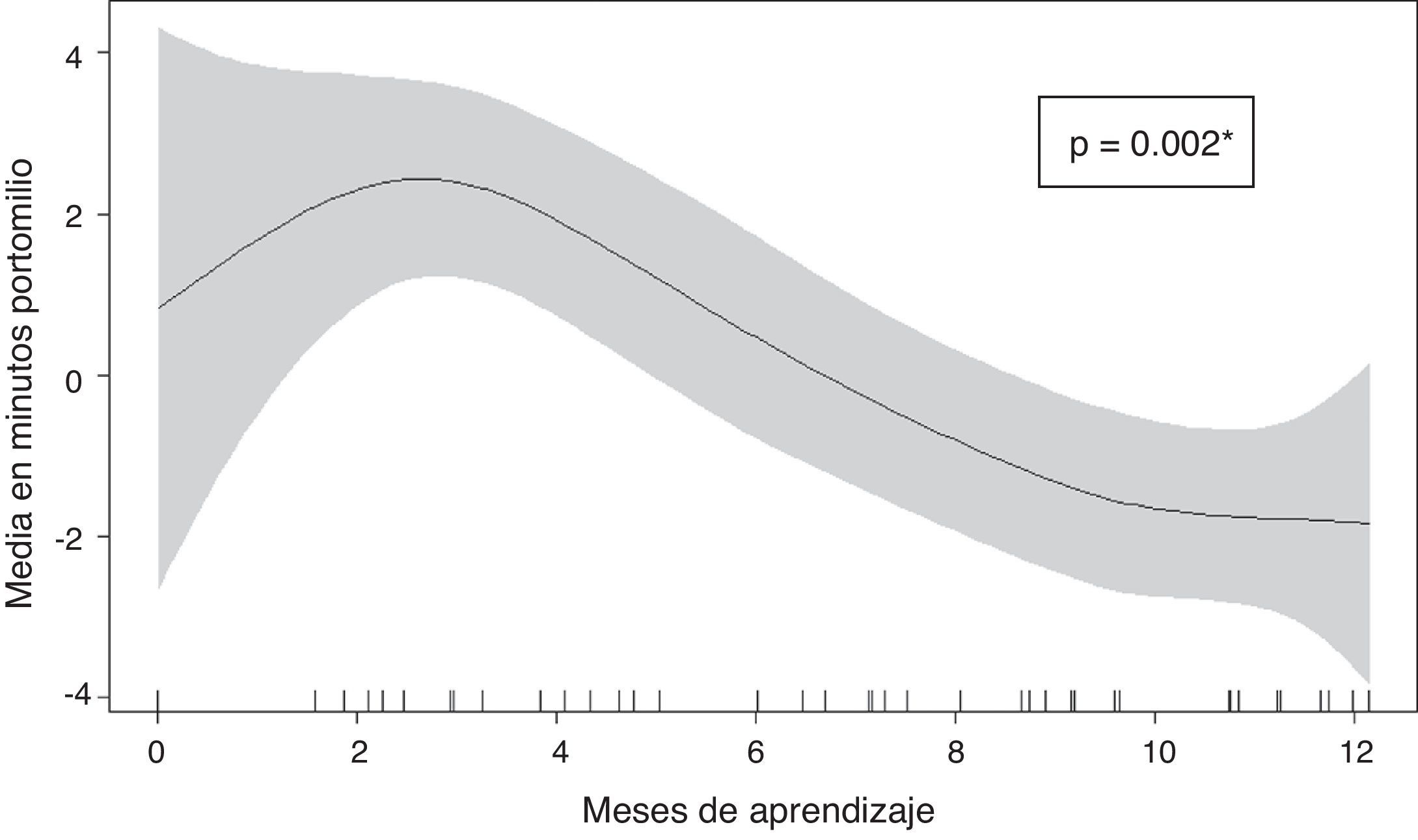
ResultadosUn total de 252 tornillos fueron colocados empleando el sistema de navegación con O-arm, con una media de 6,3 tornillos por paciente (4-10). Basándonos en la imagen de TC intraoperatorio, se recolocaron 3 tornillos, lo que representa una precisión del 98,81%. La duración media de la intervención fue de 157,2 (90-240)min, y el tiempo medio de colocación por tornillo fue de 7,13 (3,13-15)min.
Tres pacientes (7,5%) presentaron infecciones superficiales de la herida quirúrgica, tratadas de manera conservadora. Ningún paciente regresó a quirófano por malposición de los tornillos.
ConclusionesEl empleo intraoperatorio del sistema de imagen O-arm con navegación incrementa la precisión y la seguridad en la colocación de tornillos transpediculares en la cirugía de fusión lumbar.
The use of transpedicular screw fixation has been widely accepted for the treatment of degenerative and traumatic pathology of the lumbar spine. Complications of spinal instrumentation can be serious. Screw misplacement can result in unintended durotomy, nerve root and/or cauda equina injury. In comparison to fluoroscopy-assisted screw placement, computer-assisted image guidance has been shown to achieve overall higher rates of accuracy. The O-arm is able to obtain computed tomography (CT)-type images with multiplanar reconstruction. In this study we evaluated a cohort of patients who underwent posterior lumbar fusion with pedicle screws utilizing the O-arm imaging system.
MethodsA retrospective review of 40 consecutive patients who underwent posterior lumbar fusion surgery with O-arm utilization, was performed. The study population included 14 males and 26 females. Age range was 39-85 years with an average of 63.8 years. Twenty one patients had degenerative lumbar stenosis (52.5%) and 19 had spondylolisthesis (47.5%). Intraoperative CT-images were obtained. The mean time for surgery and screw placement was assessed.
ResultsA total of 252 pedicle screws were sited using O-arm navigation system, with a mean of 6.3 screws per patient (range 4-10). On the basis of intraoperative CT, 3 screws were redirected, representing a 98.81% accuracy rate.
The mean duration of surgery was 157.2 (90-240) minutes and the mean time for screw placement was 7.13 (3.08-15) minutes per screw.
Three patients (7.5%) developed superficial wound infections which were treated conservatively. No patients required a return to the operating room because of screw malposition.
ConclusionThe use of intraoperative O-arm imaging system with computer-assisted navigation significantly increases the surgical accuracy and safety of pedicle screw placement in lumbar fusion surgery.
Artículo
![]()
Si es la primera vez que accede a la web puede obtener sus claves de acceso poniéndose en contacto con Elsevier España en suscripciones@elsevier.com o a través de su teléfono de Atención al Cliente 902 88 87 40 si llama desde territorio español o del +34 932 418 800 (de 9 a 18h., GMT + 1) si lo hace desde el extranjero.
Si ya tiene sus datos de acceso, clique aquí.
Si olvidó su clave de acceso puede recuperarla clicando aquí y seleccionando la opción "He olvidado mi contraseña".

Comprando el artículo el PDF del mismo podrá ser descargado
Precio 19,34 €
Comprar ahora



